
昨日有一个上海飞松山的航班,在起飞后几分钟报告两套自动驾驶仪都接不通。
一套不工作我听说过,两套都接不通,这就稀奇了。曾经在考试中问过别人的问题:“空中如果两套自动驾驶都不工作该怎么办”,成了真实的情况。我一边联系机务,一边想到RVSM,RNP,RNAV,二类都不能用了,还能不能飞松山?松山是不是有RNP APCH?飞往台湾的航路上能不能申请RVSM以下运行?我记得飞台湾有高度限制,具体是多少怎么突然想不起来了。如果飞过去还能不能飞回来。我承认在当时以上问题我一个答案都没有,而且有时间压力的情况下,的确慌乱了。
机务建议继续飞往松山,回程可MEL。我只能先把机务的意见转告机组。在那一瞬间,我想让飞机返航,但是我又拿不定主意,因为我只是扫了一眼飞行计划、QRH和MEL,还没有时间看航路上的限制,没有充分的理由。我本来想先让飞机飞一会,如果发现不行再返航,因为油量是足够的。但是我记得飞台湾的交界点肯定有高度限制,而且航班很快就会飞到交界点的,这个时间压力对我影响很大。幸好,随后飞机又出现了速度配平故障灯,机组考虑到复合故障,就决定返航了。
今天,有时间回忆一下昨天发生的事情,对自己的不足做个弥补。
先说QRH,我在事发当时看了QRH中自动驾驶仪的内容。两部都失效没有什么必要的操作,改为人工操纵就行了。今天看了速度配平的QRH也是没有什么内容。这两个系统都是辅助设备。
再看看MEL。
22-01B两部自动驾驶都可以失效,但是飞行时长可接受,而且不能执行延程运行、RNP AR、RNP-1、RNP-4、RVSM、RNAV-1、RNAV-2、CAT-II。
22-10速度配平系统2套可以失效1套。要求机务验证剩下的1套工作正常,速度配平不工作灯工作正常。因此,我认为就算自动驾驶都失效可以放行,空中出现速度配平灯亮,说明两套速度配平系统可能都有故障,或者是别的什么系统引起了两个速度配平系统故障。在松山能不能按这条MEL放行回来还真不好说。
再说回两套自动驾驶失效,上海和松山之间是否需要上述运行能力呢?航路如图所示,高度KASKA之前是9200米,之后是FL300。(情报说KASKA有特殊的交接协议,因此是双数高度层,而且有高度限制。我和管制朋友核实的确如此。)
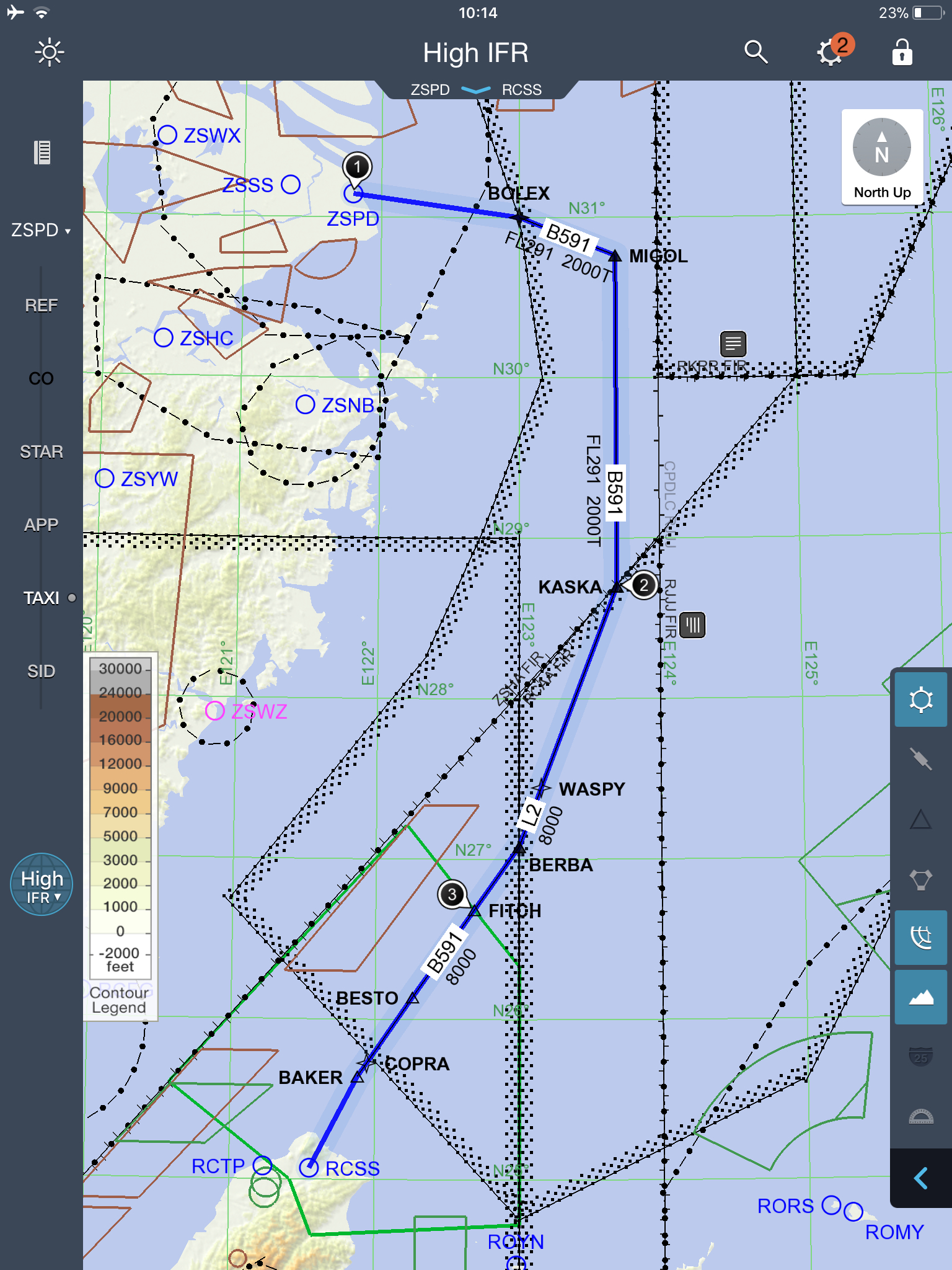
因为计划的飞行高度层在RVSM内,我本来想说机组和管制申请降一个高度层,从92降到84,就可以不用进RVSM了,但是现在发现B591这一段的MEA是FL291。因此无法降低高度,所以没有RVSM的话,这段就没法飞。另外,发现B591这一段是RNAV航路,但备注中写也可以接受NON-RNAV的飞行,不过再往南的L2航路也是一条RNAV的航路,没说可以接受NON-RNAV。所以没有RNAV能力,L2这段也没法飞。再看看松山的图。松山的进场没有RNAV,10号/28号有APCH但是也有传统。综上所述,这条航路至少需要RVSM和RNAV,因此两套自动驾驶都坏没法飞。
==============================================================
总结需要改进的地方:
1)在有时间压力的情况下,找出一个航班必须的所有运行能力是很难的。我现在坐在办公室的电脑上,花了1个小时来确认手册和航图。
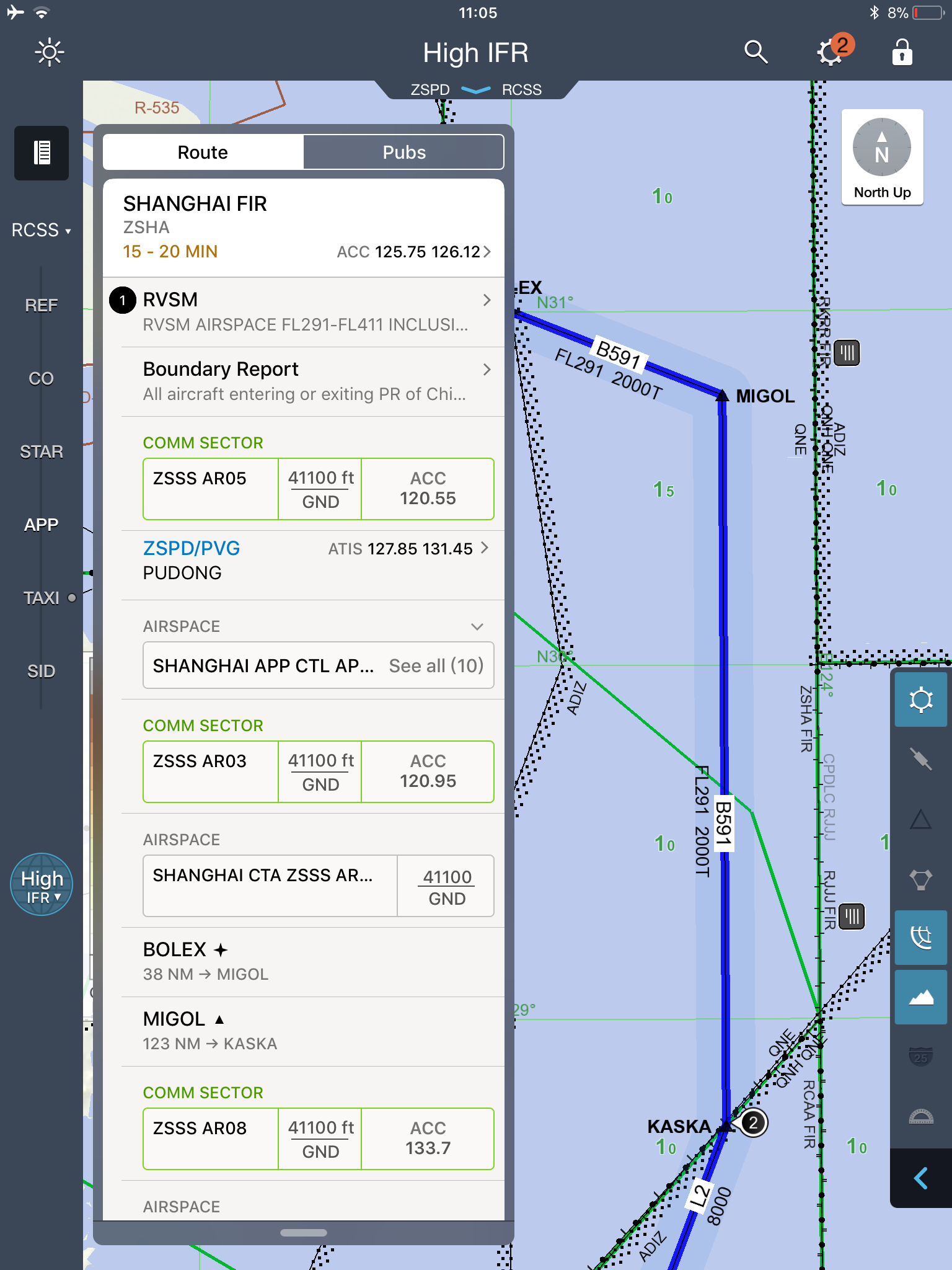
2)EFB里的jeppesen航图软件可以加快这个过程,可以把航路输入进去,点击航路带号就能找到航路属性和信息。
3)空中出现故障养成看MEL的习惯。这个例子就很典型,QRH上什么都没有,MEL上一大堆限制(两套速度配平故障根本不能放行)。
4)返航落地注意检查落地超重,至少提醒机组主意超重。
5)做好资源管理,一个人查手册,一个人寻求机务、飞行支援,一个人回甚高频。