
分类目录归档:QRH
密码保护:一次787的空中故障和跳开关的重置
ROLL AUTHORITY和信息报告流程
回复
ROLL AUTHORITY是MAX飞机特有的一个信息。简单说来,当出现横滚的指令,飞机无法完成的时候,就会触发。有声音告警和PFD上显示,如图:

在737max的QRH中,解释了几个可能造成Roll Authority的原因:
•推力不对称
•错误的飞机配平
•燃油不平衡
•不对称机翼结冰
•襟翼或缝翼不对称
•飞行操纵卡阻或受限制
但目前运行下来的情况,往往是由于阵风造成的。曾经波音还要求译码,但是后来译多了,发现都是风造成的,后来就不要求译码了。详见机务兄弟的帖子:https://www.airacm.com/read/367406/
问题在于,飞行机组不认为这是故障,所以就不会写飞行记录本。但是却认为是安全信息要报告签派。签派再回头告诉机务时,机务就认为需要检查飞行,而且时间还很长。因此造成意外的航班延误。
===========================================================
这事就让我想到了我那辆Model X。有一段时间,我的X在自动驾驶时,会报告方向控制系统失效,自动驾驶系统退出且无法再次接通。需要完全断电才可能恢复。我问了客服,结果告诉我是因为,车机里有个设置,好像叫“车道辅助”,就是驾驶的时候,车机认为你偏离道路划线了。就会主动给方向盘施加一个外力,把车子拉回到车道线。而国内的车道线有时不清晰,我开车时就会人工阻碍这个外力。久而久之,车机的辅助驾驶系统,就认为这个方向控制系统失效了,因此就报错,禁用了整个自动驾驶系统。
787的电子EFIS面板,这个真有意思
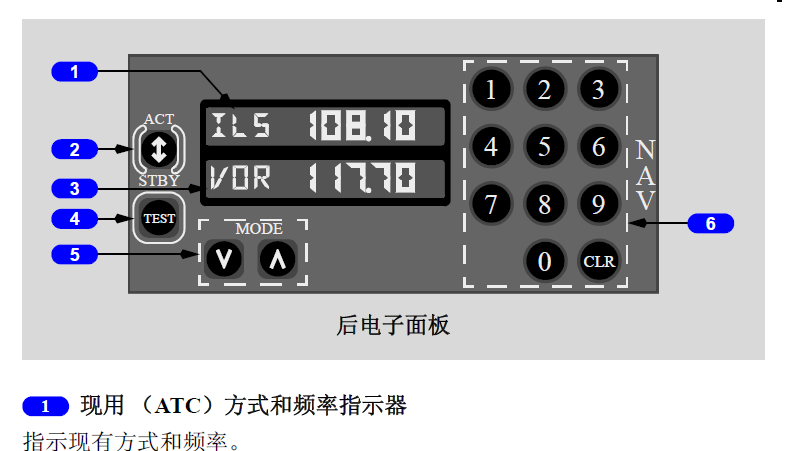
某日,某个航班机组反馈EFIS面板CANC/RCL按钮故障。按了没反应,后续滑回排故。后来我得知,787有个电子的EFIS面板,但只能超控掉机长或者副驾一侧的EFIS。如下图:

而当天的情况是,物理的按钮和电子的按钮,都没有反应,那就是飞机的问题了。

引气压力低造成航班返航
都说我值班倒霉。周六的时候一个航班起飞后报告左发引气压力低。空调和增压方面没有特殊情况。航班正在大约起飞30分钟后的巡航阶段。机务也监控到引气压力低了。在通过卫星电话和机组联系,尝试重置两次后,都没能提高引气压力。
在处置过程中,我惊讶地发现,波音737的引气压力低是没有QRH的。最后我们决定用引气跳开(BLEED TRIP OFF)这条来处理,虽然引气跳开是因为超压或超温,我们现在是没压力,但是结果都是一样地把一边的引气关掉。
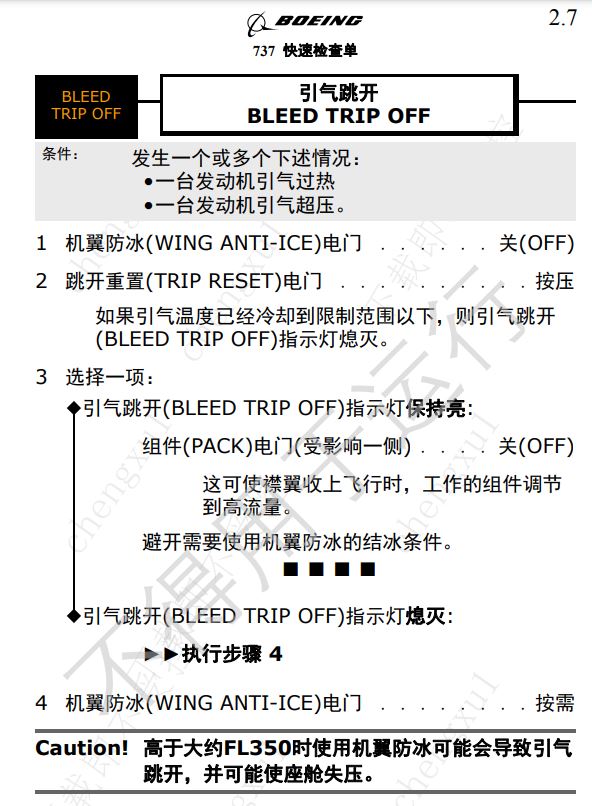
从检查单上可以看到,关闭一侧的引气和对应的空调组件,但是剩下的一个引气不足以支撑另一侧高流量的空调组件+大翼防冰。因此就要避开结冰条件了。
不巧,这个航班是从上海飞乌鲁木齐,不但有可能用到大翼防冰,还存在释压供氧航段。如果硬着头皮使用大翼防冰,那可能造成引气跳开和失压。所以考虑返航了。检查了一下载量和油量,落地正好不超重。
我顺便看了一下320系列的QRH,空客系列有个AIR ENG 1/2 BLEED ABNORM PR,虽然我也没看到这个ABNORM是指高压还是低压。
从空客320的MEL上看,MEL36-11-01A中提到了一个引气失效后的放行操作流程。特别提示:
飞行机组应考虑到结冰条件的严重性。如果剩余的发动机引气供给系统也不工作时,将失去机翼防冰。
并且在飞行过程中,如果需要使用大翼防冰,可以将受影响一侧的空调组件关闭。
从波音737的MEL上看,MEL36-11-03压力调节和关断活门(PRSOV)一个引气失效的情况下,要求不在积冰气象条件下飞行(应该是不够大翼防冰了),飞行高度FL250以下。并且在地面时,为了防止发动机EGT超温,不能给两个空调供气。
从这个角度看,737的空调是要比320的弱一点。
密码保护:空中一部惯导失效与PBN运行
双EEC备用模式,BOTH EEC ATLN AND DISPLAY SOURCE
前几天遇到一个航班空中故障。机组下行的ACARS是这样的:
WE/MEET/BOBT/EEC/ALTN,FA,ILAND/DSPLY/SOURCE
可能是机组发ACARS时候输入有误,我们一下没明白BOBT是啥意思,后来想了一下,应该是BOTH的意思。以往只遇到过一个EEC变为备用模式,两个同时ALTN是第一次遇到。看了一遍QRH,倒是没有什么大的影响。
然后我就想理解一下为什么DISPLAY SOURCE会一下子影响两个EEC。

在网上找了一下资料。原来,在EEC和ADIRU之间,还有一个DEU(显示电子组件),是这家伙坏了。
Both EEC’s require input from two DEU’s to operate in the NORMAL mode.If only one DEU is enerqized both EEC’s receive 1 DEU input and change to the SOFT ALTERNATE mode indicated by two amber ALT lights on the ENGINE CONTROL panel,accompanied by a MASTER CAUTION.Of course you’ll also see an amber DSPLY SOURCE indication on both PFD’s indicating that there is 1 DEU providing info to all 6 DU panels.
NORMEL时两个EEC使用两个DEU的数据。如果只有一个DEU可用,那么两个EEC从一个DEU获得数据,并工作在SOFT ALTN模式,两个EEC备用模式灯都亮。。。。当然,同时还会有DSPLY SOURCE的告警,代表了一个DEU为6个DU显示数据。
所以,小飞机还是小飞机呀,系统冗余只有两套,只能舍弃其中一个,而如果有三套冗余的话,就可以自动比对数据、剔除错误数据了。这让我想到了MAX上的迎角探测器也只有两个,如果能标配三个的话,就不会出现后面的事情了。
787的防冰MEL
去年的10月份,一架787在起飞30分钟后出现了EAI PRSOV L(左发防冰压力调节和关断活门)状态信息。虽然在QRH中没有什么需要操作的内容。但是在MEL的状态信息页,波音很周到地提供了对应的MEL条款。

按照以往737的惯性思维,我猜这些MEL会说是把发动机防冰活门失效在开位,并增加油耗;或者把活门失效在关位,并不得在结冰气象条件下运行。由于这个航班是一个10小时的洲际航班,我担心飞出去飞不回来。
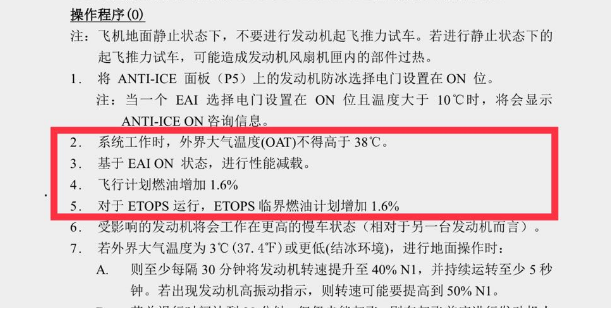
然后是我们看到MEL条款写的是把活门失效在半开位(好新奇)。我猜是因为787的发动机功率太大,如果完全失效在开位太猛了。随后发现O项内容,也仅仅是燃油增加1.6%,似乎还可以,起飞性能也够,对回程航班没有很明显的影响。
===================================
在了解787防冰系统的时候,从一位飞行员朋友那里了解到787发动机的另一个防冰功能,冰晶防冰(ICA)。
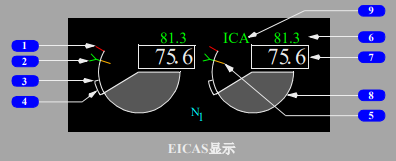
冰晶防冰是一种全自动的功能,不过我查了一下MEL和QRH,如果ICA功能故障的话,空中没有操作要求,但是地面不能放行。FCOM对ICA的描述如下:
另一篇波音的文章介绍冰晶积冰是一种高空的积冰,往往影响发动机的内部核心机。
High-altitude ice crystals in convective weather are now recognized as a cause of engine damage and engine power loss that affects multiple models of commercial airplanes and engines. These events typically have occurred in conditions that appear benign to pilots, including an absence of airframe icing and only light turbulence. The engines in all events have recovered to normal thrust response quickly. Research is being conducted to further understand these events. Normal thunderstorm avoidance procedures may help pilots avoid regions of high ice crystal content.
SLATS PRIMARY FAIL和MEL使用的问题
前几天讨论到这个故障,在QRH中没有特别的要求。
但是在MEL中直接就不能放行了。

这样的标准落差造成在航班滑出后至起飞前的控制就比较敏感了。我没有找到特别新的DDG,但是在2010年的描述里找了一下英文原文。
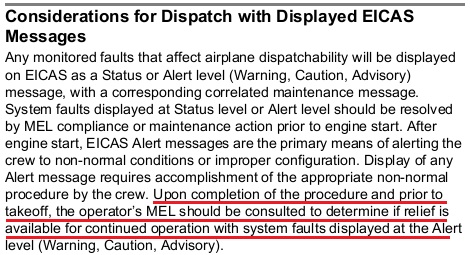
对比一下有些公司的中文MEL,文中描述为”自身动力滑行前”。我个人认为这样的描述不太好。
好在现在公司的手册已经把MEL与QRH的切换时间改为了”设置起飞推力”。也就是在起飞推力前出现的故障,都需要看MEL。并且对MEL的m项和o项也有了更具体的规定。需要机务确认完成m项工作才能放行。
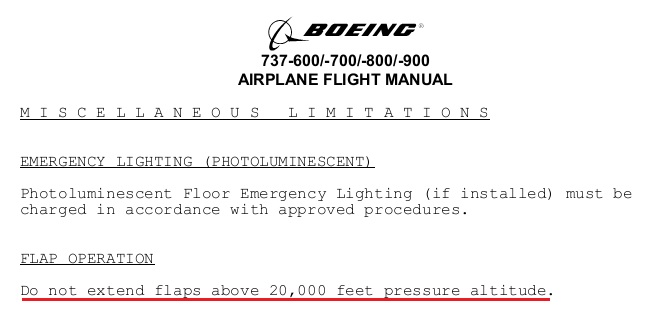
襟翼的2万英尺限制
想起前几天厦航在拉萨机场,襟翼故障的事件,说到了放襟翼飞行不能超过2万英尺的限制。这个限制以前我从没注意过,因为它不是什么常用性能限制,我公司也没有这样高的高高原机场运行。今天早上我查了一下波音和空客的AFM。的确是有这个限制。网上说,最简单的理由是,飞机在试飞时,就没有带襟翼飞过超过2万英尺的数据。
相比于这个限制值,我更想知道2万英尺的由来。为什么是2万英尺呢?为什么不是1万?为什么不是3万呢?
我在网上搜索答案。先这是一个2013年的帖子:B737 Maximum Flaps Extended Altitude
有意思的是,这个帖子中楼主抛出这个问题后,回复的人说“怎么有这个傻的问题”、“不会有运行环境呀,怎么可能遇到2万英尺放襟翼的事”。呵呵。这个帖子没有给我什么有用的idea。
最后换谷歌搜索,发现了一个来自smartcockpit.com的文件。源文件->戳。
文中说到空气的压缩性是关键。当空气低速流动时,空气动力学认为空气是不可压缩的,当高速运行的时候,就要考虑压缩性了。这个界限大约发生在0.5马赫到0.55马赫之间。
飞机在设计时,对于襟翼收上时(光洁构型),同时考虑飞机的低速性能以及高速性能;当襟翼(或其他增升装置)放出时,一般都是在低速时用到,因此只考虑了低速性能。也就是认为空气不可压缩。
所以,襟翼标牌上的速度,除了考虑结构强度之外,也考虑了空气压缩性的这个界限来设置的。我翻出性能原理的书,找到那张《指示空速-马赫数-高度》的图表。如下图:
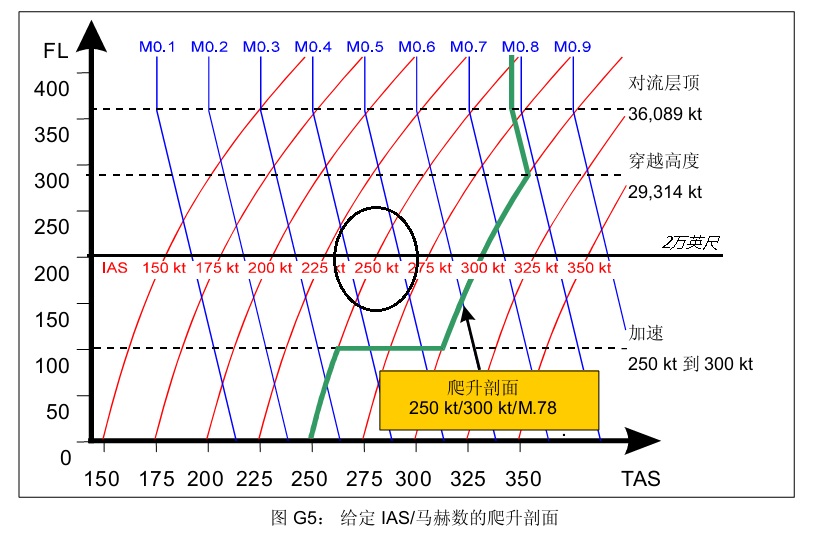
从图上看,0.5马赫在2万英尺对应的表速大概就是260节。所以,250节的标牌飞到2万英尺差不多就遇到空气的压缩性了。
对于这个文件的说法,由于不是波音/空客的官方回复。所以我也不敢肯定真的是这个原因。
==========================分割线=========================
思考。。。。如果我保持0.5以下的马赫数爬升,我是不是可以带着襟翼飞到2万英尺以上去?
空中两套自动驾驶仪都不工作,这种倒霉的事真能碰到。
昨日有一个上海飞松山的航班,在起飞后几分钟报告两套自动驾驶仪都接不通。
一套不工作我听说过,两套都接不通,这就稀奇了。曾经在考试中问过别人的问题:“空中如果两套自动驾驶都不工作该怎么办”,成了真实的情况。我一边联系机务,一边想到RVSM,RNP,RNAV,二类都不能用了,还能不能飞松山?松山是不是有RNP APCH?飞往台湾的航路上能不能申请RVSM以下运行?我记得飞台湾有高度限制,具体是多少怎么突然想不起来了。如果飞过去还能不能飞回来。我承认在当时以上问题我一个答案都没有,而且有时间压力的情况下,的确慌乱了。
机务建议继续飞往松山,回程可MEL。我只能先把机务的意见转告机组。在那一瞬间,我想让飞机返航,但是我又拿不定主意,因为我只是扫了一眼飞行计划、QRH和MEL,还没有时间看航路上的限制,没有充分的理由。我本来想先让飞机飞一会,如果发现不行再返航,因为油量是足够的。但是我记得飞台湾的交界点肯定有高度限制,而且航班很快就会飞到交界点的,这个时间压力对我影响很大。幸好,随后飞机又出现了速度配平故障灯,机组考虑到复合故障,就决定返航了。
今天,有时间回忆一下昨天发生的事情,对自己的不足做个弥补。
先说QRH,我在事发当时看了QRH中自动驾驶仪的内容。两部都失效没有什么必要的操作,改为人工操纵就行了。今天看了速度配平的QRH也是没有什么内容。这两个系统都是辅助设备。
再看看MEL。
22-01B两部自动驾驶都可以失效,但是飞行时长可接受,而且不能执行延程运行、RNP AR、RNP-1、RNP-4、RVSM、RNAV-1、RNAV-2、CAT-II。
22-10速度配平系统2套可以失效1套。要求机务验证剩下的1套工作正常,速度配平不工作灯工作正常。因此,我认为就算自动驾驶都失效可以放行,空中出现速度配平灯亮,说明两套速度配平系统可能都有故障,或者是别的什么系统引起了两个速度配平系统故障。在松山能不能按这条MEL放行回来还真不好说。
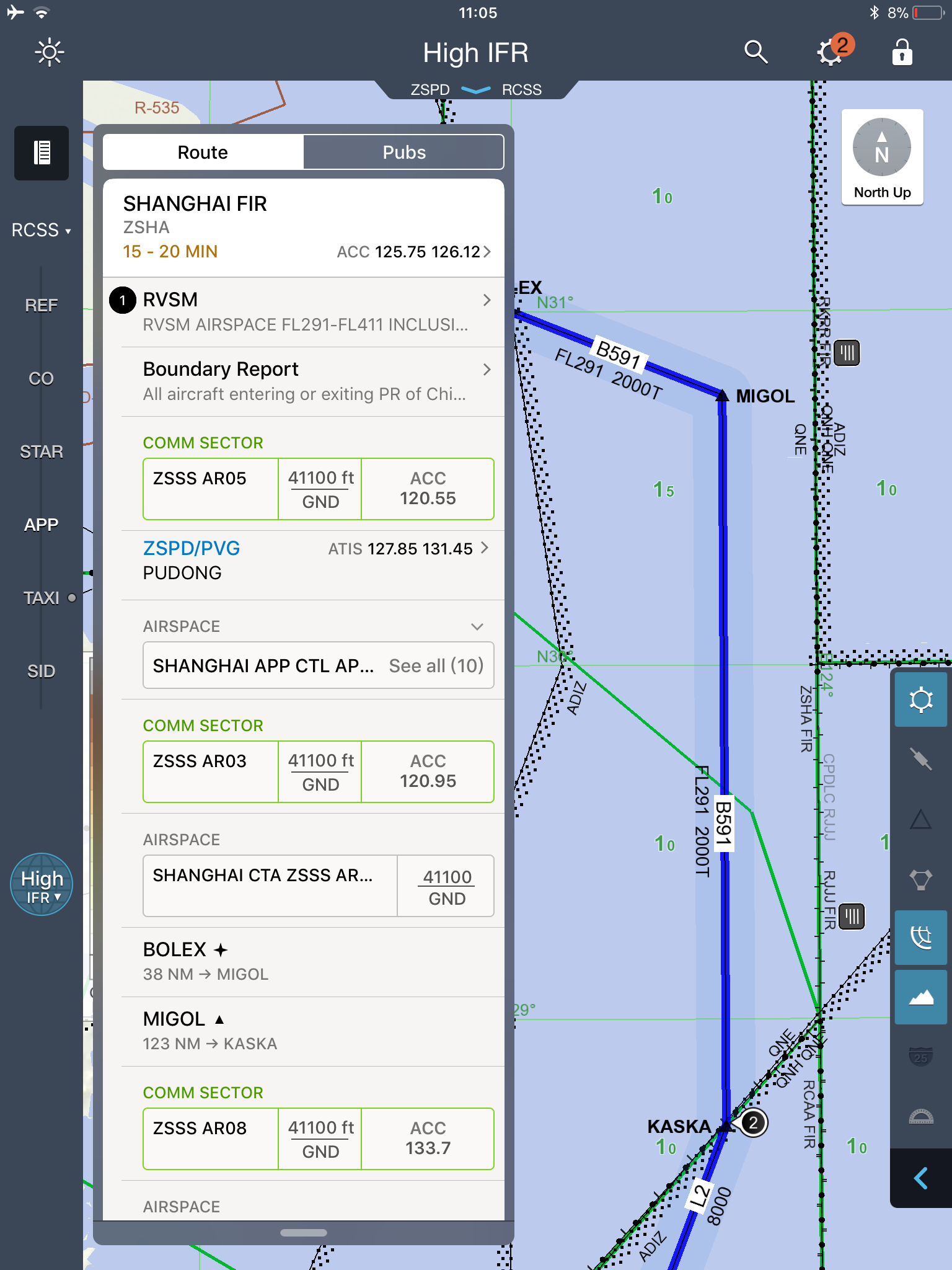
再说回两套自动驾驶失效,上海和松山之间是否需要上述运行能力呢?航路如图所示,高度KASKA之前是9200米,之后是FL300。(情报说KASKA有特殊的交接协议,因此是双数高度层,而且有高度限制。我和管制朋友核实的确如此。)
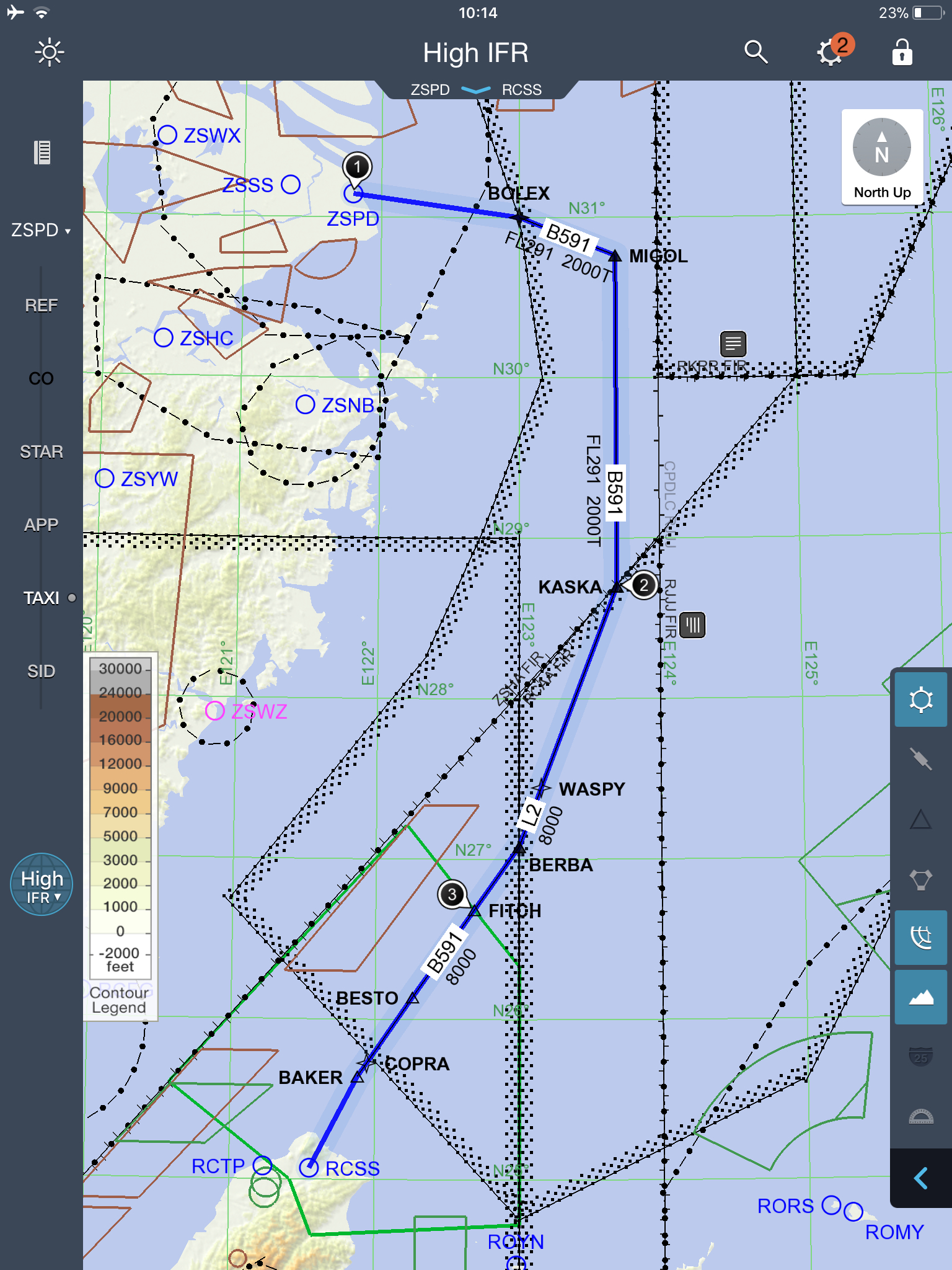
因为计划的飞行高度层在RVSM内,我本来想说机组和管制申请降一个高度层,从92降到84,就可以不用进RVSM了,但是现在发现B591这一段的MEA是FL291。因此无法降低高度,所以没有RVSM的话,这段就没法飞。另外,发现B591这一段是RNAV航路,但备注中写也可以接受NON-RNAV的飞行,不过再往南的L2航路也是一条RNAV的航路,没说可以接受NON-RNAV。所以没有RNAV能力,L2这段也没法飞。再看看松山的图。松山的进场没有RNAV,10号/28号有APCH但是也有传统。综上所述,这条航路至少需要RVSM和RNAV,因此两套自动驾驶都坏没法飞。
==============================================================
总结需要改进的地方:
1)在有时间压力的情况下,找出一个航班必须的所有运行能力是很难的。我现在坐在办公室的电脑上,花了1个小时来确认手册和航图。
2)EFB里的jeppesen航图软件可以加快这个过程,可以把航路输入进去,点击航路带号就能找到航路属性和信息。
3)空中出现故障养成看MEL的习惯。这个例子就很典型,QRH上什么都没有,MEL上一大堆限制(两套速度配平故障根本不能放行)。
4)返航落地注意检查落地超重,至少提醒机组主意超重。
5)做好资源管理,一个人查手册,一个人寻求机务、飞行支援,一个人回甚高频。
CATII 要不要APU?
机组问APU故障能不能飞二类啊。我用后脑勺想了一下,觉得应该是不需要APU的。但是机组说检查单上低能见近进有APU开的要求。Start APU at 1000ft。我顿时无言以对。
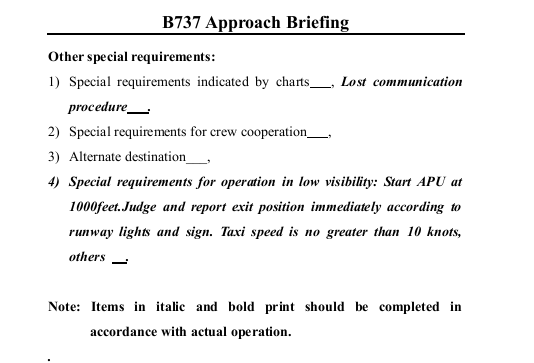
但是机组似乎忽略了下面的Note:黑色字体根据实际运行需要完成。
我查看了QRH前一页的内容:
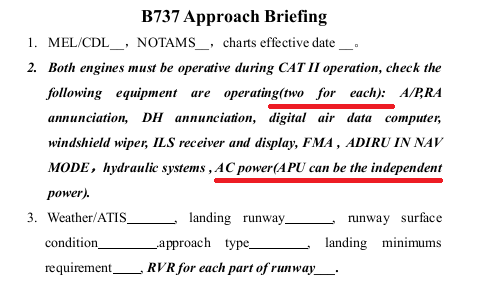
所以,CAT II其实是要求2套AC电源的意思。并不是一定要开APU。
所以说只剩1套AC电源的时候就不能用二类了。
不过,说回来,只剩一套AC电源的时候,也不可能要落二类机场,早就近备降去了。
Multi-Mode Receiver (MMR) & 目视近进标准
我关注这个设备是因为一次空中故障。一架737报告两部MMR都不工作,机组称无法调导航台频率。当时我对这个MMR还不了解。在我印象里737调频率应该是这样的:

但这架新飞机是这样的:

好吧,我建议以后机型培训也要做到与时俱进,新设备都没学过。赶紧去看看这个设备的介绍。
原来MMR的作用是把VOR/ILS/GNSS/MarkerBeacon/MLS都整合到了一起。虽然这些设备任然需要天线,但是不需要各自的接收机了,MMR接收机包办了一切。并且更重要的是,它是以后GLS的必须设备。我的理解是因为GBAS的系统需要用VHF信号来校正GPS的信号,所以把这些信号做在一个接收机里方便处理(FAA关于GBAS的介绍、AirBerlin关于GLS和MMR的使用介绍)。
这东西好处很多,但是整合在一起是有风险的,说回那天的故障。机组在空中报告两部MMR都不工作,瞬间失去了调ILS和VOR频率的能力,询问我们用什么仪表和标准落地呢?我当时被问蒙了。
机组问能否用目视进近落地?幸好虹桥晚上是OK天,目视标准肯定够,但是我不确定公司的目视进近标准到底是多少。在小董同学的提醒下,我们发现手册里写了:
(a)目视进近
(1)机场标高3 千米(含)以上,能见度不小于8 千米;机场标高3 千米以下,能见度不小于5 千米;
(2)云底高300 米(1,000 英尺)或以上;
(3)根据飞行运行所在空域,云底高和云下飞行必须能允许飞行机组保持规定最低安全高度。
这个千年不同的条款,竟然会有用到的一天。在97部咨询通告里也有相同内容:
6.目视运行
在机场执行目视起飞和进近着陆时,驾驶员应确保飞机在云外飞行, 并保持对地面目视参考的持续可见。一般情况下,要求机场云底高不小于300米;如果机场标高等于或高于3000米(10000英尺)时,VIS不小于8000米,如果机场标高低于3000米(10000英尺)时,VIS不小于5000米。经局方特殊批准,可使用云底高不低于100米、VIS不小于1600米的标准。
下班后回到家,我一直在纠结这个问题。我觉得这个坑太大,虽然同时坏两台MMR的几率很小,但是如果虹桥不是OK天怎么办呢?落地标准直接从RVR550飙升到VIS5000。如果区域天气能见度都不好,没地方备降怎么办?虽然剩下ADF不是由MMR控制,但是很多机场已经没有纯NDB近进程序。
A330 EIU FAULT
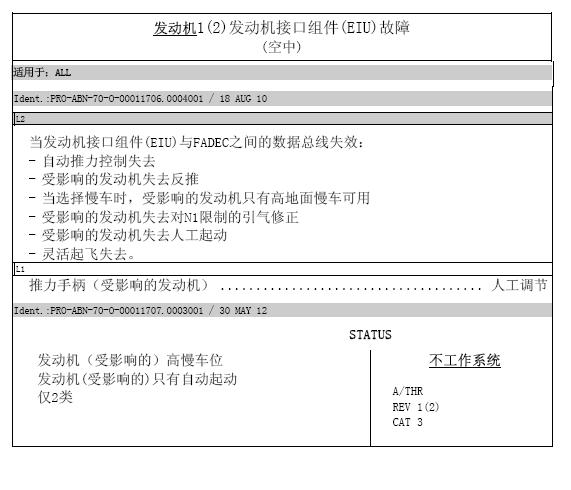
今天遇到一个330航班出现EIU故障。这个故障我是第一次听说,它似乎是发动机和FADEC之间传输信息的一个部件。详细的说明见下图: 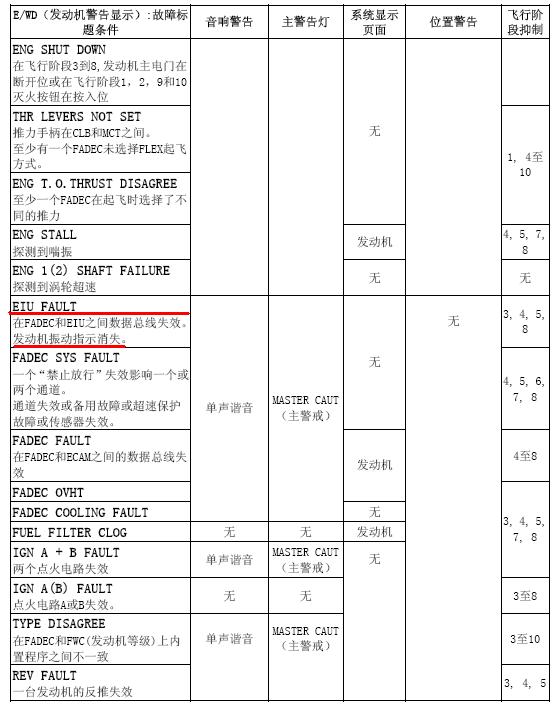
它的失效造成自动油门实效,抖振指数为XX,失去反推,机组还反映计算机中显示飞机处于单发飞行的计算状态,没有了速度和性能管理,最佳高度和最高高度都变成了单发的性能。
如果机组想知道最优高度和最高高度,可以通过QRH中的空中性能章节查表得到。但是飞行速度如何确定呢?因为飞行计划中速度是按照成本指数计算的,只提供了航路点的真空速,没有马赫数或指示空速(我觉得这是计划格式的缺陷),所以机组说不知道应该飞什么速度了。
于是乎,我找到性能值班,用软件计算了一个“Cruise at optimum speed”表格,表格提供了某个飞机重量在某个高度时最优的巡航速度(可能是MRC或LRC,我不确定)。表格中有马赫数值。但是机组却纠结于要按成本指数飞行,而我计算不出成本指数的速度。对此我只能说某机组过于矫情。
事后我想了想,如果机组硬要按成本指数飞行,也可以。拿计划上每个航路点的真空速根据环境温度计算出马赫数或指示空速。过程如下:
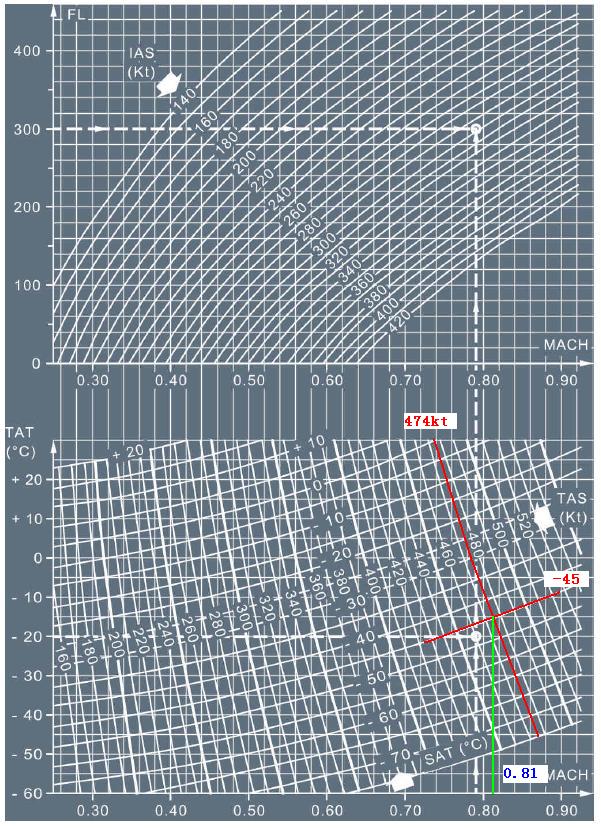
比如计划中某个航路点的真空速为474节,根据计划上的外界温度或机上测得的外界温度-45度,就可以计算出马赫数为0.81多一点点。这和我拿软件计算的结果也没差多少。
所以,最后的结论是:机组矫情。
330一台发动机滑油消耗异常
某天,一架330在空中出现一台发动机滑油慢慢消耗的问题。大约2.5小时消耗了1.1夸脱。预计还要飞行7.5小时。机组报告时还剩下14夸脱左右。我查了FCOM和QRH,和机务确定了最低4夸脱时将出现告警:
FCOM:
QRH:
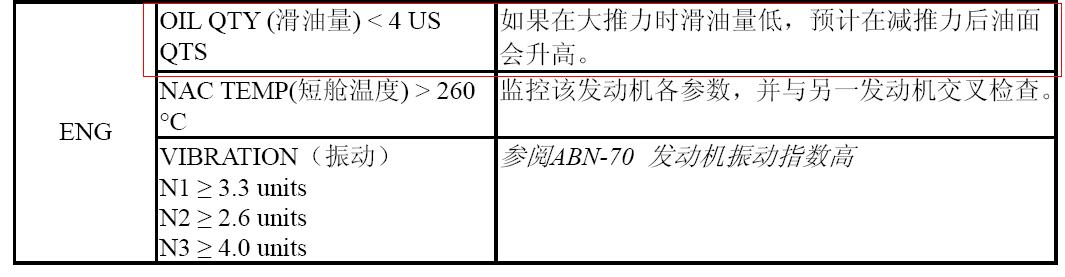
我没发现什么特别的QRH项目,只说到减少推力可以增加滑油量。我们考虑将要进入ETOPS区域,和每小时的滑油损失量。我们和机组决定继续飞行,如果滑油低于8夸脱就考虑备降。
不过听说后来飞机滑油低至12夸脱后就没再减少。
一次污染跑道培训
前几天,我去广汉飞行学院参加了一个污染跑道的培训。我以前没去过广汉,工作后这几年也没再回学校读过书。所以除了接受培训之外,趁这次机会,回味了一下大学的时光。
回到家后,我想总结一下这几天学到的内容。总结一下法规、制造商、机场、公司这几个方面在污染跑道运行方面的新知识。
法规:
这次培训围绕CAAC在09年发布的AC-121-FS-2009-33展开,陆续说道了FAA SAFO 08003、EU-OPS 1.520 1.480、AC91-79、AMC 25.1591、ICAO DOC 9137、MH5001-2006、TALPA/ARC。
就我最关心的跑道上污染物厚度界定的问题,培训中的解答是:咨询通告没有明确规定多少厚度以上的污染物算作污染跑道。但是公司可以根据制造商的定义来运行。
| 湿 | 污染 | |
| 水 | 小于3mm | 3-13mm |
| 融雪 | 当量:咨询通告没有说清楚。 只能遵循制造商的规定。 但是波音更本没说过当量的问题。 |
|
| 湿雪 | ||
| 干雪 | ||
| 压实的雪 | 无 | 任何 |
| 冰 | 无 | 任何 |
可见,局方没有给出如何界定污染跑道的标准。
其他文件中,我觉得最重要的是TALPA/ARC。TALPA/ARC的研究成果是《Runway Condition Assessment Matrix(RCAM)》(草稿文件)。我觉得它是一个综合了机组报告、测量摩擦系数和污染物厚度的表格。把各种信息汇聚成“好中差”。这样方便了性能和飞行,以同样的结果分析问题。空客的计算过程中也使用了这张表。
制造商:
我发现四川这边都是空客的地盘。所以这次培训请来的是空客的老师。空客从12年5月开始,把OLD的概念引入手册,和原先的RLD、ALD相对。
在12年5月之前,以ALD为主。放行时RLD=ALDx1.67×1.15计算得到。空中计算没有明确的法规要求,往往以ALDx1.15来判断。
在12年5月之后,ALD从手册中消失,只存在于软件计算中。放行时,RLD的计算方法不变,但是由软件直接计算得出,不需要人工计算。飞行时使用OLD,可以根据报告的刹车效应(QRH中的RCAM)、故障和环境修正计算出OLD(计算方法变得更像波音),并乘以1.15的系数,称为FOLD,用以判断可否落地。OLD更贴合一般飞行员的飞行水平,更符合日常运行的落地距离。但是在遇到污染跑道放行时,必须用WetCheck之后的RLD,和FOLD对比一下,取大者。这个过程不是自动的,需要每次人工计算一下。(一旦FOLD不够,如何从FOLD计算减载重量也是一个问题,空客的答案是,自己凑。)
对于MEL的故障,手册中给出了OLD的系数。同一系统的叠加故障有直接系数;不同系统的叠加故障没有直接系数(软件可算)。如果飞机按MEL放行后,在空中出现新故障,可以先用故障查出OLD,再乘以MEL系数。(具体的计算方法,见戳,我等公司手册更新以后再研究。)
再来说说波音的情况。波音在787和747-8的QRH中提供的落地距离是符合TALPA/ARC建议的落地距离。777和737NG目前没有改变。这个说法是我在波音的网上找到的,不是本次培训的内容。戳
机场:
这次培训还了解了一些机场测量摩擦系数的技术。对于有条件的机场,配备了测量摩擦系数的车。测量结果如图:
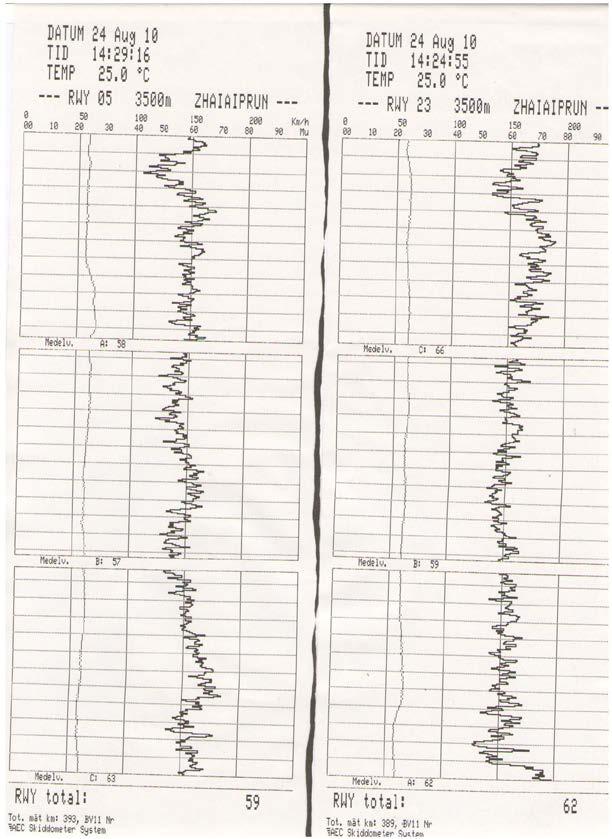
测量结果分三段。但是这个方法有局限性:1)测量结果传递不方便;2)跑道末端300米左右无法测量;3)摩擦系数较低时,测量车测量困难;4)繁忙机场测量时机少;5)摩擦系数和刹车效应没有明确对应关系。
对于污染物的厚度问题,机场的人明确说无法测量。目前没有这方面的工具,也没有这方面的规范。
公司:
我一直觉得,每次公司总是最吃亏的。培训中,各个公司遇到的问题都差不多。为了保守运行,只能把不确定的情况当成污染来运行。就算能快速、准确地计算落地距离也没有用,因为你无法从机场那边得到有效的数据。而局方的不作为也助长了这种情况。比如,我建议能否让机场在NAIP中公布干跑道的摩擦系数,并在暴雨或冰雪时报告实时的摩擦系数,用两个数据做对比的方法确定跑道的状况。局方却建议我直接和机场联系获得这些数据。
总之,这次培训不错。遇到了来自各地的朋友,还遇到了曾经在天津一起加一的同学。
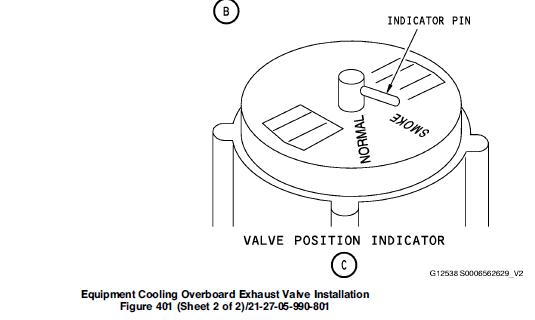
设备冷却排气风扇
前几天遇到一个738飞机滑行时出现设备冷却排气风扇关断故障。我对QRH里的说法有些不明白。
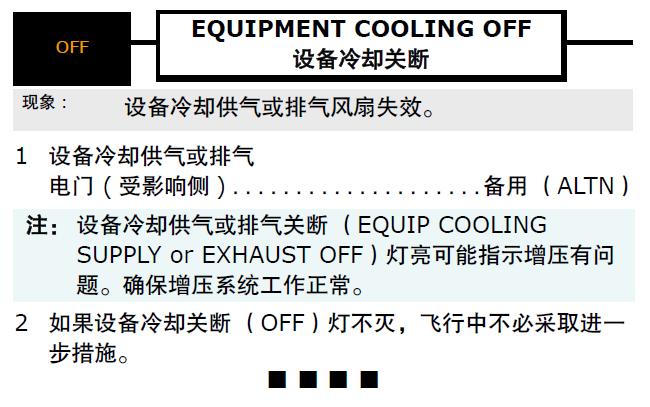
怪我机型没学好,对文中说的“可能指示增压有问题”的说法不理解。当时我隐约记得,设备冷却排气可以排出机体外,但是又不能肯定是如何排出机外的。现在查查资料补补课。
那个活门叫舱外排气活门。由于翻译的问题,还可能叫“机外排气活门”,或者“机外放气活门”。大概在前货舱位置。活门有NORMAL和SMOKE两个位置。在地面或低压差时打开,用来通风。如果关闭,设备冷却的气体被排入前货舱。活门被自动控制,而且驾驶舱内没有开关的指示。
在MEL中这个活门可以失效在打开位,但是需要非增压飞行,或者必须两个空调持续增压。
我虽然理解了这个活门的作用,但是我依然不理解它和“设备冷却排气关断”之间的逻辑关系。我不确定QRH里的“确保增压是否正常”是不是针对这个活门。也许得找个机务问问。
关于复位跳开关的疑惑
737系列的QRH里说:“除非在非正常检查单中有要求,一般不建议机组循环操作(拨出再复位)跳开关来清除非正常情况。”
但是737的机组训练手册里说:“在非正常检查单未规定的情况下,尝试通过循环系统操作或跳开关来复位系统。”
在空中,如果出现了QRH上没有说明的故障,到底可不可以用复位跳开关的方式来重置系统呢?
密码保护:CRJ的3号液压系统和起落架收不上
对于767货舱门的一个疑问
前几日夜里守夜,天气是极好的。最后几个航班起飞后,同事们都去休息了。我准备拿点吃的东西出来,填饱肚子,好熬过漫漫长夜。
卫星电话响了,某767机组打电话来说:起飞后,散货舱的舱门有问题,灯亮了,但是增压没有问题,问我要不要继续往前飞。
我想增压没问题就可以,如果那个舱门是朝内开的那就肯定没问题。唉,怪我业务不熟。我不知道散货舱的舱门是朝外开的还是朝内开的。
我打电话问了机务,机务建议继续飞行,老飞机假信号多,落地后把舱门多开关几次就好了。
自己给自己补课:
767-300一共三个货舱门:前货舱,后货舱,散货舱

前货舱和后货舱都是朝外开的,尺寸不一样:


散货舱是朝里开的:

PS:货舱门的操作限制风速也在这本手册的这一页上。以前找过,怎么没找到呢。
===================================
但是QRH中对货舱门告警的操作让我有个疑惑:


QRH中只要前货舱门有问题,不管增压是否正常,立即就需要采取行动;对后货舱和散货舱门的问题,反应程度就低一个级别。这是为什么呢?
如果说因为散货舱是朝内开的,增压正常就无需关心,这点我可以理解。但是后货舱和前货舱一样是朝外开的,为什么后货舱不需要直接采取行动呢?难道前后两个舱门的结构是不相同?