发现这个大坑是因为在opt计算过程中,737-8和787的计算界面增加了无油重zfw的输入框子。按理说计算起飞重量时无所谓zfw是多少,那么为什么需要输入无油重呢?
===========第一层坑============
这个坑从25部的25.1001说起。
25.1001条要求飞机要配备放油系统,除非证明飞机起飞重量能满足在本场落地时的爬升性能。如果具备放油能力,可以放油15分钟后的重量来计算落地的爬升性能。
所以,事情就变成了这样:对于具有放油系统的飞机,在计算起飞最大重量时,考虑放15分钟油之后的重量是否能满足爬升性能。如果不满足,就要降低重量。但是如果放不了这么多油(如放油系统设计的限制,或者没加多少油)怎么办呢?只能减少无油重啦。
原先,飞机的最大结构限重设计得不是很大,所以限重不明显(或者说故意被忽视了)。但是随着新材料的发展,最大无油重可以做得很大。比如787,想象一下,如果在一个高原机场起飞,业载很大,但是航程很短(油很少,比如兰州满客飞西安),就会造成就算放了油,仍然不能满足爬升性能。
==========第二层坑==========
那么不具备放油系统的飞机怎么办呢?比如737系列。根据我现在了解的情况,波音似乎认为NG系列的737不受此条法规的限制,在起飞性能计算过程中没有这个返场的限制。但是在737max系列的性能中有这个限重,并且在fcom的签派性能页中增加了一个叫“放油限重”的表格。说来奇怪吧,对于一个没有放油系统的飞机,却有一个放油限重。所以在max系列飞机的性能计算时,是考虑返场限重的,因为没有放油系统,所以直接限了起飞全重。
至于为啥NG不考虑25.1001条,max系列考虑了,我猜是在因为在787审定过程中,对法规有了新的理解。
===========第三层坑==========
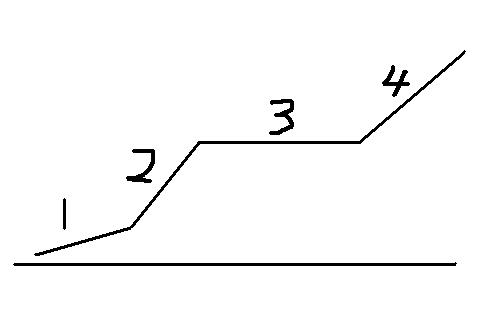
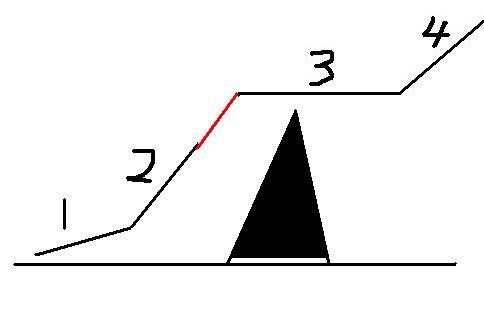
既然起飞重量受限于返场落地的爬升性能,那么可以改善爬升性能呀。波音的确也是这样做的,波音提供了选择。
通常,落地爬升性能分为进近爬升和复飞爬升,襟翼为30或40/15。为了提高性能,波音提供了30/5甚至15/1的襟翼选择。但是航空公司却需要为机组付出更多的培训成本。(我觉得波音把这个锅甩给了公司)
==========也许是个解决办法=======
在考虑这个大坑时,我们一直在纠结一个问题,这个限重究竟是制造商的审定限制还是公司的运行限制。如果是制造商取证时的限制(毕竟是25部),那么就不应该甩给公司运行时限制;如果是运行限制,那么,公司可以有更多的选择权,比如选择起飞备降场。可以对于某些落地爬升性能很差的起飞机场,每次都选择一个性能更好的起飞备降场。